



Beard Board Version

Robocar Controller是一款移动应用程序,旨在提供“无命令”的用户体验,让您开始使用Donkey Car。本文提供了有关如何使用此应用程序的分步指南。

在开始之前,您需要满足以下条件:
Robocar Controller在Apple的App Store和Google Play商店均可使用。只需在手机上安装此应用即可。
ps:我们实际上想将此应用称为“ Donkeycar Controller”,但由于Donkeycar是商标,因此需要在这里做一些进一步的工作来符合Apple的规定。

该移动应用仅适用于我们制作的预构建OS映像。该映像包含一个名为Donkey Car Console的管理软件,该软件是开源的,并且我们在OS中进行了许多调整以支持热点和低电池自动关机等功能。使用此映像有一些警告,包括安全风险。有关详细信息,请参阅此OS映像在github上的回购。您还可以在存储库中找到用于通过SSH登录该映像的用户名和密码。

这是上述步骤的演示:
完成首次设置后,您可能要做的第一件事就是校准汽车。点击进入校准屏幕。将显示两个选项卡以配置转向和油门:

对于PCA9685,可以使用滑动条调整LEFT和RIGHT的值。更改该值时,转向应该动态变化。您甚至可以使用控制旋钮测试汽车是否可以直线行驶。
“油门”选项卡上的“前进/后退”值也是如此。
校准后,点击驾驶按钮以开始驾驶汽车。系统将询问您是否要使用虚拟游戏杆或物理游戏杆。现在选择虚拟游戏杆。此外,系统还会要求您分享您的当前位置。该应用程序将此位置(经度,纬度)添加到浴缸的meta.json文件中。

该应用程序将显示带有两个控制旋钮的Drive UI。默认情况下,左侧用于控制油门,右侧用于向左/右旋转。

使用右上角的录制按钮开始录制。屏幕上方有一个计数器,显示到目前为止已记录了多少张图像。请注意,即使停止移动,录制也不会停止。如果浴缸中有很多汽车无法移动的图像,则基于这些图像训练的模型也可能无法正确移动。完成驾驶后,请点击左上方的退出按钮以退出驾驶界面。该应用程序将向您显示行车摘要:

数据视图显示您在树莓派上收集的所有数据(数据桶)。

当点击这些浴缸中的任何一个时,该应用程序将使用donkey makemovie命令为您生成视频。您也可以预览一些图像以检查质量。此外,您可以使用导出功能将视频保存到手机或生成浴缸的tarball并将其保存在手机的某个位置(或其他云存储,例如Dropbox)。

截至今天,我们为移动应用程序用户提供免费的培训服务。
要训练模型,请从控制面板转到训练页面。您将看到您之前提交的火车工作清单。在此阶段,您应该在那里看不到任何东西,因为您尚未开始任何培训工作。点击右上角的“ +”按钮来训练您的第一个模型。

系统将要求您选择要训练模型的水桶。请注意,您可以一次选择多个浴缸,然后在按下火车按钮之前,系统会向您显示摘要。数据将被上传到我们的服务器以开始训练过程。

训练完成后,应用程序将为您显示训练损失和准确性图表。同时,该应用程序会将模型下载到您的汽车上,您可以开始测试模型。

您可以通过两种方式启动自动驾驶仪。一种方法是在火车功能内启动自动驾驶仪。就像上面显示的屏幕截图一样,您可以直接从那里启动自动驾驶仪。另一种方法是使用控制面板上的“自动驾驶”功能。该应用程序将列出Pi内的所有型号。换句话说,您可以将模型复制到Pi中,但仍可以使用该应用程序启动自动驾驶仪。

一旦进入Drive UI,就可以在“用户”模式和“自动驾驶”模式之间切换。切换到自动驾驶仪并测试模型。您可以使用紧急停止按钮快速切换回用户模式。
ps:自动驾驶仪-角度尚不可用
Doneky汽车软件带有多种配置,您可以进行试验。我们提供了一些您可能想要更改的常用选项。
要访问此功能,只需转到设置->车辆设置以检查您可以更改的选项。

如果您是经验丰富的驴车用户,那么这只是一个可以轻松更新myconfig.py的UI。
本文向您展示如何在不键入单个命令的情况下将Robocar控制器与Donkey汽车软件一起使用。我们希望这将简化并降低每个人尝试Donkey Car的技术障碍。感谢您阅读并访问Donkey Discord,以告诉我们您使用该应用程序的经验。
如果您有任何建议或只是想报告错误,请随时在此处提交问题。
如果您打算使用此应用程序来赚钱,请遵循驴车指南,并让我们知道。
—
原文:https://medium.com/robocar-store/robocar-controller-quick-start-guide-bdf8cb16d7ce
如果不使用神经网络的参赛者仅需看第4与第5部分内容!
1.0 DonkeyCar的安装
1.1安装miniconda Python 3.7
安装miniconda Python 3.7 64位。
安装方法参见:Windows 10下安装Miniconda3
1.2安装git 64 bit
安装git 64 bit。
安装方法参见:GIT -2.18.0-64.bit 的安装与使用
1.3创建项目目录
从开始菜单启动Anaconda Prompt
创建并更改为您希望用作项目的目录
C:\Users\adminitrator>d:
D:\>mkdir projects
D:\>cd projects
1
2
3
1.4从Github获取最新的Donkeycar
git clone https://github.com/autorope/donkeycar
cd donkeycar
git checkout master
1
2
3
1.5更换国内源
conda config –add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free
conda config –add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main
conda config –set show_channel_urls yes
1
2
3
1.6更新与删除
conda update -n base -c defaults conda
conda env remove -n donkey
1
2
1.7创建Python Anaconda环境
conda env create -f install\envs\windows.yml
conda activate donkey
pip install -e .[pc]
1
2
3
1.8安装Tensorflow GPU(可选)
如果你有NVidia卡,你应该更新到最新的驱动程序并安装Cuda SDK。
conda install tensorflow-gpu==1.13.1
1
1.9创建工作目录
donkey createcar –path D:/mycar
1
安装keras-vis
pip install keras-vis
1
2.0安装DonkeySim
d:
cd projects
git clone https://github.com/tawnkramer/gym-donkeycar
conda activate donkey
pip install -e gym-donkeycar
1
2
3
4
5
3.0修改相应文件
3.1修改dtypes.py
文件位置:D:\Miniconda3\envs\donkey\lib\site-packages\tensorflow\python\framework\dtypes.py。
修改dtpes.py文件的第526~530、535行。
原:
_np_qint8 = np.dtype([(“qint8”, np.int8, 1)])
_np_quint8 = np.dtype([(“quint8”, np.uint8, 1)])
_np_qint16 = np.dtype([(“qint16”, np.int16, 1)])
_np_quint16 = np.dtype([(“quint16”, np.uint16, 1)])
_np_qint32 = np.dtype([(“qint32”, np.int32, 1)])
np_resource = np.dtype([(“resource”, np.ubyte, 1)])
1
2
3
4
5
6
修改为:
_np_qint8 = np.dtype([(“qint8”, np.int8, (1,))])
_np_quint8 = np.dtype([(“quint8”, np.uint8, (1,))])
_np_qint16 = np.dtype([(“qint16”, np.int16, (1,))])
_np_quint16 = np.dtype([(“quint16”, np.uint16, (1,))])
_np_qint32 = np.dtype([(“qint32”, np.int32, (1,))])
np_resource = np.dtype([(“resource”, np.ubyte, (1,))])
1
2
3
4
5
6
3.2修改train.py文件
文件位置:D:\projects\gym-donkeycar\examples
\supervised_learning\train.py
修改train.py文件的第29行:
原:
matplotlib.use(‘Agg’)
1
修改为:
matplotlib.use(‘TkAgg’)
1
4.0 DonkeySim模拟器的使用
4.1下载DonkeySim模拟器
从Donkey Gym Release下载并解压主机PC平台上可运行的模拟器(DonkeySimWindows.zip)。
将模拟器放在合适的位置。如:~/projects/DonkeySimWindows。
可使用游戏杆/键盘手动驾驶、自动驾驶还可使用训练好的神经网络驾驶,运行界面如下:
选择窗口大小,点击“Play!”进入。
点击“Log dir”可设置记录数据目录。
在主界面点击“Generated Track”,进入我们挑战赛的赛道环境。
可以选择右侧的各种驾驶模式。
这是速度、转向和PD参数设置界面,在自动驾驶时,要设置这些参数,取得好成绩。
4.2设置验证
打开Anaconda Prompt。
使用示例模型来验证设置。
conda activate donkey
d:
cd projects\gym-donkeycar\examples\supervised_learning
python evaluate.py –model=models/example_model.h5
1
2
3
4
启动“DonkeySim”环境。单击“NN Control over Network”按钮。
4.3获取自己的训练数据
现在,你可以尝试根据自己的数据来训练自己的模型。
在模拟器中,按“Exit”进入主菜单。
单击“log dir”按钮并指定一个日志目录以保存数据。例如,你可以选择d:/projects/gym-donkeycar/examples/supervised_learning/log文件夹。
选择Generated Track环境。
单击“Auto Drive w Rec”或“Joystick/Keyboard w Rec”。记录约1万个样本(一圈以上)。查看左下角以查看日志计数。
完成后,单击“Stop”。
4.4训练模型
conda activate donkey
d:
cd projects\gym-donkeycar\examples\supervised_learning
python train.py –inputs=log/*.jpg –model=models/model.h5
1
2
3
4
模型结构可根据自己需要进行修改。
取消train.py文件的第208行注释,显示模型信息。
修改models.py文件(可设置学习率):
在第7行增加:
from tensorflow import keras
1
第57行修改为:
model.compile(optimizer=keras.optimizers.Adam(lr=0.0001), loss=’mse’, metrics=[‘acc’])
1
4.5评估模型
conda activate donkey
d:
cd projects\gym-donkeycar\examples\supervised_learning
python evaluate.py –model=models/model.h5
1
2
3
4
启动模拟器。选择Generated Track环境。单击“NN Control over Network”。
5.0 DonkeySim挑战赛
5.1 DonkeySim挑战赛类别
参加DonkeySim挑战赛的车必须连续不间断跑3圈以上,小车不能压到草坪,不能撞到障碍物,挑战赛共分为三大类:
游戏杆/键盘驾驶(Joystick/Keyboard)
自动驾驶(Auto Drive)
神经网络驾驶(NN Control over Network)
5.2 DonkeySim参赛者提交文件
参加DonkeySim挑战赛的选手,参赛作品必须提交以下文件、数据和视频。
5.2.1选手与作品简介
年龄和性别要真实(便于以后进一步的赛果分类),其他介绍可自由发挥;
参赛者首先应根据已公开(如该类别没有人提交或提交数少于10个)的其他参赛者提交的文件自行进行测试对比,成绩在前十名之内的即可提交,否则请不要提交。
5.2.2数据文件
自行测试成绩以文本文件方式提交;
数据要真实,不得人为编辑修改;
游戏杆/键盘驾驶参赛者提交压缩的原始数据记录(log)文件;
自动驾驶参赛者提交压缩的原始数据记录(log)文件和速度/转向/PD参数截图;
神经网络驾驶参赛者提交文件:
压缩的原始训练数据记录(log)文件
D:\projects\gym-donkeycar\examples\supervised_learning目录下的conf.py和models.py文件
D:\projects\gym-donkeycar\examples\supervised_learning\models目录下的model.h5和model.h5loss.png文件
5.2.3视频文件
游戏杆/键盘驾驶与自动驾驶参赛者提交原始数据记录(log)文件转成的.mp4格式文件,转换方法如下:
首先将DonkeySim内要转换为视频的记录数据(log),复制到D:\mycar\logs文件夹下,并运行下列命令:
conda activate donkey
d:
cd mycar
donkey makemovie –tub=D:\mycar\logs\log –out=log_movie.mp4
1
2
3
4
输出文件名为log_movie,mp4
神经网络驾驶参赛者视频文件的提交是可选的,也必须是.mp4格式的视频文件,请自行用合适的办法解决(参赛者如有好的方法,请共享出来,让大家享用)。
5.3 DonkeySim挑战赛评比方式
DonkeySim挑战赛公开参赛者提交的所有文件,采用自测与公示的方式进行评比,比赛成绩及时更新。比赛规则根据实施情况,听取大家的意见,不定时的更新,所有的原始数据尽量可靠的保存。
————————————————
版权声明:本文为CSDN博主「平衡-JL」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/wujingyu67971348/java/article/details/101982829
选择“Auto Drive No Rec”或“Auto Drive w Rec”即可进入DonkeySim的自动驾驶模式,开始测试时用“Auto Drive No Rec”方式,不记录数据,等调试稳定后再用“Auto Drive w Rec”方式运行,并记录数据,记录数据时如“DonkeySim游戏杆/键盘驾驶”一文选择记录数据文件夹。
在自动驾驶方式中需要调节如下图所描述的PID控制参数。
自动驾驶“Auto Drive w Rec”方式如下图所示。
————————————————
版权声明:本文为CSDN博主「平衡-JL」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/wujingyu67971348/java/article/details/102326899
下载DonkeySim:从Donkey Gym Release下载并解压主机PC平台上可运行的模拟器(DonkeySimWindows.zip)。
解压并将模拟器放在合适的位置。如:D:/projects/DonkeySimWindows。
运行DonkeySim:双击可执行文件DonkeySim.exe即可进入DonkeySim启动界面。
如果取消“Windowed”前面的“勾选”,点击“Play!”进入的是“全屏”界面,否则可在“Screen resolution”下拉列表中选择你想要的分辨率后再点击“Play!”进入。
点击“Log dir”选择记录数据文件夹。
点击“Generated Track”进入赛道环境。
点击“Joystick/Keyboard No Rec”进入“游戏杆/键盘”驾驶操作状态。
按键盘上的“A,S,D,W”键或“上,下,左,右”箭头键即可操控小车的运动,按下“Stop”停止小车的运动,按下“Exit”退出比赛环境。按下“Quit”退出DonkeySim程序。
等熟练操作小车运动后,点击“Joystick/Keyboard w Rec”进入“游戏杆/键盘”驾驶操并记录驾驶数据,录下视频,提交文件,参加DonkeySim挑战赛了。
左下角的“Log”后面的数值为记录的帧数。
————————————————
版权声明:本文为CSDN博主「平衡-JL」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/wujingyu67971348/java/article/details/102312971

这是系列的第3部分。以下是第1部分和第2部分的链接。经过几天的挣扎,我终于让我的驴车在地下室的轨道周围自动驾驶!这里有一个简短的视频:
所以这就是让我失望的原因。当我将我的模型从我的Mac上传到Pi并运行“驱动器”命令时,加载模型时出错。我一直在重新运行这些步骤并得到了同样的错误。我花了几天才意识到我在Donkey Car上运行旧版TensorFlow(1.8)和更新版本我的MacBook Pro上的TensorFlow 1.12版本。我还在Donkey Car帮助Slack频道上发布了一个问题,他们在使用较新的TensorFlow版本1.12构建的模型上确认不会在较旧版本的TensorFlow上运行。一旦我弄清楚如何在我的Mac上降级TensorFlow(一线pip shell命令),我重新训练,用SCP将我的新模型转移到Pi,我的车开始运行……那是在我意识到我之后将相机镜头盖打开……
我从一个约16K图像的相对较小的训练集开始。TensorFlow 1.12的训练时间为55分钟,TensorFlow 1.8的时间为75分钟。1.8发布于2018年4月。让我们希望DonkeyCar图像很快升级,这样我们都可以利用这些性能改进!我也只是在赛道周围逆时针方向使用了一套测试装置。在真正的比赛中,我会用顺时针和逆时针方向训练赛车。但这也会增加构建模型的时间。
虽然汽车可以绕过轨道,但很容易被地板上的灯光和侧面的其他白色物体的反射所欺骗。这是因为我在地板上只使用了一条白色胶带。这对视觉系统来说还不够用。但是,我不认为我的妻子真的要我画一条宽大的黑色“道路”,中间有黄色条纹,就像官方的Donkey Car轨道一样。
当我终于让汽车在自动模式下工作时,它非常令人满意。但是也有点“怪异”。我实际上“教”了一个小大脑来跟随地板上的线。它几乎似乎模仿我糟糕的驾驶。它甚至学会了如何在直道上加速,并且在紧凑的曲线上减速。真的很酷!
虽然我在TensorFlow和Keras的工作中做过一些工作,但很多步骤都有点抽象。一旦我开始玩驴车,事情就更容易理解了。系统的优势及其弱点都变得清晰。我还意识到,在训练系统(我的MacBook)和推理系统(Pi)之间同步Python和TensorFlow库是一个关键步骤。
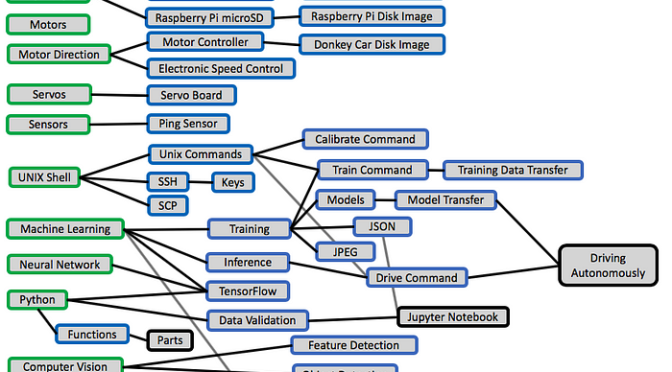
在完成所有步骤后,我现在了解了大部分组件,并且我正在构建一个“概念图”,其他人可以使用它来帮助理解他们需要知道什么概念才能让他们的Donkey Car运行。
我现在正在回顾我学到的所有步骤,并将这些步骤与我为当地CoderDojo俱乐部制作概念卡的先前工作相结合。这是博客文章顶部的数字。概念图中的每个方框最终将成为1/2张层压纸,正面有活动和问题,背面有答案。这些在CoderDojo中被称为“寿司卡”,因为它们是比特大小的学习点。以下是“电动机”概念卡的示例图像:

我的朋友Jon Herke也有兴趣使用Donkey Cars建立一个“AI赛车联盟”,旨在教孩子们关于人工智能和机器人技术。请继续关注我们是否可以为hackdays建立一个基础和一个为期10周,每周4小时的夏令营类型计划。我们希望让女孩和弱势青年参与这些计划。如果您有兴趣帮助我们入门,请告诉我们。

这是关于Donkey Car的3部分系列的第2部分。这是第1部分和第3部分。在第1部分中,我谈到了如何基于Raspberry Pi启动并运行新的Donkey Car,并使相机连接正常工作。我用RPi Cam Web界面测试了相机,并在我们家的一楼开车,以感受汽车的感觉以及它如何导航。

在这种模式下,Pi只是在Web服务器后面的便携式摄像机,将视频图像传输到其网页。RC汽车完全由汽车附带的2.4 Ghz控制器控制。要运行RPi Cam Web Interface软件,我只需打开Pi上的终端并从github站点下载代码。然后我运行了启动Web服务器的startup.sh脚本。
我感兴趣的是,相机拍摄的图像与网页上出现的图像之间有多大的延迟。延迟可以忽略不计,这让我只需通过观看网页上的图像来驾驶汽车。这意味着相机和Pi之间的输入/输出速度很快,因为图像通过WiFi芯片转换为Web浏览器。它基本上证明了Pi中有足够的马力来进行实时远程视频驱动。
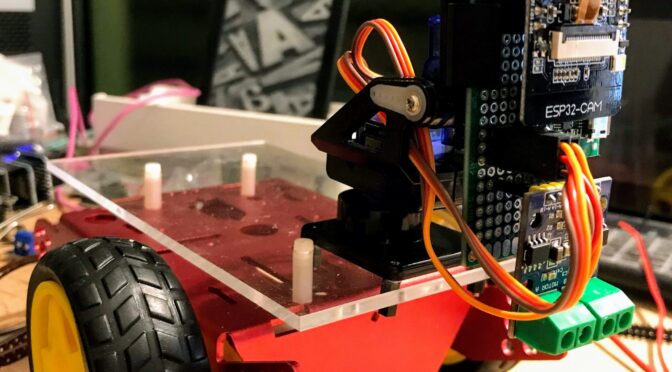
然后我断开连接器与RC汽车附带的2.4GHz接收器,并将连接移动到我从亚马逊订购的伺服控制器。虽然这个伺服控制器板设计用于控制多达16个伺服系统,但我们只需要使用两个伺服系统。一次是速度,一次是转弯。我还必须将四条线从伺服控制器连接到Pi 40 Pin GPIO总线。这些连接的照片如下:

下一步是转向和加速度计的校准。要做到这一点,我必须SSH到Pi并运行校准。这个过程有点棘手,因为许多电子速度控制器(ESC)有点不同。据记载毛驴车网站在这里。因为我的“停止”频率不正确,我仍然无法让汽车进入倒车状态。最终结果是我们有一个配置文件,可以编码油门的参数和汽车的转向。
一旦完成,我就准备开车绕过测试跑道了。令我妻子懊恼的是,我把地下室的家具搬到了房间的一侧,在地下室的地板上放了一些白色的电工胶带。我们在地板上放了一层很酷的环氧树脂涂层,但白色胶带的对比度很好。

你还可以看到地板上灯光的很多反射。我们的训练过程必须学会忽略光反射,只能对地板上的白色胶带“注意”。注意力是深度学习的一个重要概念。
然后,我从墙上插头上取下了Pi,并使用我在亚马逊上购买的新型6800 mAH电源组为其供电。我用了一些磁带来固定平台下的电源组。我应该注意,来自ESC的GND和VCC导线确实为RC汽车中使用的2.4GHz接收器中的数字电路供电。然而,这个电流不足以为Pi供电。作为测试,我在Pi运行时将USP电流表连接到汽车上。结果如下图所示:

一旦我们将所有汽车组装好,我们就可以生成训练数据集了。然后我做了一个SSH进入Pi并启动了驱动程序:
$ python manage.py drive
这是一个python程序,它启动一个Web服务器,显示摄像头上的内容,它还为您提供了一些捕获训练集的控件。一旦驱动程序开始,您可以转到任何Web浏览器并使用端口8887键入您的汽车的IP地址。现在是困难的部分。我不得不在赛道上开车10次以建立一个训练集!
问题是虽然我可以用键盘键控制汽车,但很难驾驶。我也试过网络界面“指针”,但这也很难引导。最后,我拿出手机,在手机浏览器中拉出了Donkey Car的网页。网络浏览器足够智能,可以检测到手机的前倾和侧向倾斜,并将其转换为速度和转弯。非常聪明!通过大约一个小时的练习,我可以绕过课程。然后我按下“开始录音”,大约10圈后我按下“停止录音”。完成此操作后,我可以通过SSH进入Donkey Car并将目录更改为“tub”文件夹。在该文件夹中有大约30K .jpg和.json文件。每个JSON文件都具有对图像的引用以及时间戳,加速和转向作为浮点数。这是我们的培训数据。
以下是JSON文件的示例:
{
“user / angle”:0.18989955357142868,
“user / throttle”:0.7175781250000001,
“user / mode”:“user”,
“cam / image_array”:“1000_cam-image_array_.jpg”,
“timestamp”:“2019-01- 05 17:09:35.184483“
}
这是与该JSON文件对应的图像:

然后我将Donkey Car中的图像复制到我的笔记本电脑进行培训。我将在第3部分介绍。