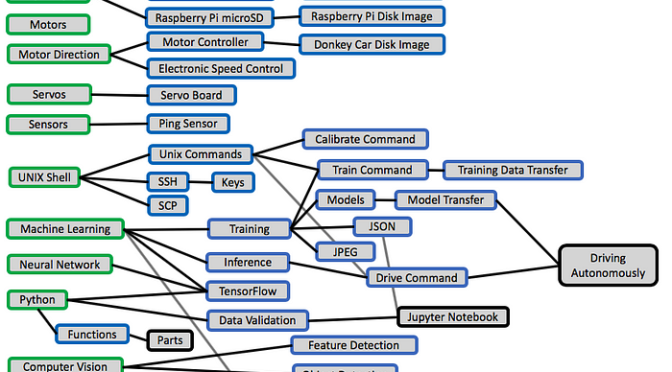

绿色是初始的概念,蓝色的中间概念, 黑色是高层次的“完成”概念。
这是系列的第3部分。以下是第1部分和第2部分的链接。经过几天的挣扎,我终于让我的驴车在地下室的轨道周围自动驾驶!这里有一个简短的视频:
所以这就是让我失望的原因。当我将我的模型从我的Mac上传到Pi并运行“驱动器”命令时,加载模型时出错。我一直在重新运行这些步骤并得到了同样的错误。我花了几天才意识到我在Donkey Car上运行旧版TensorFlow(1.8)和更新版本我的MacBook Pro上的TensorFlow 1.12版本。我还在Donkey Car帮助Slack频道上发布了一个问题,他们在使用较新的TensorFlow版本1.12构建的模型上确认不会在较旧版本的TensorFlow上运行。一旦我弄清楚如何在我的Mac上降级TensorFlow(一线pip shell命令),我重新训练,用SCP将我的新模型转移到Pi,我的车开始运行……那是在我意识到我之后将相机镜头盖打开……
我从一个约16K图像的相对较小的训练集开始。TensorFlow 1.12的训练时间为55分钟,TensorFlow 1.8的时间为75分钟。1.8发布于2018年4月。让我们希望DonkeyCar图像很快升级,这样我们都可以利用这些性能改进!我也只是在赛道周围逆时针方向使用了一套测试装置。在真正的比赛中,我会用顺时针和逆时针方向训练赛车。但这也会增加构建模型的时间。
虽然汽车可以绕过轨道,但很容易被地板上的灯光和侧面的其他白色物体的反射所欺骗。这是因为我在地板上只使用了一条白色胶带。这对视觉系统来说还不够用。但是,我不认为我的妻子真的要我画一条宽大的黑色“道路”,中间有黄色条纹,就像官方的Donkey Car轨道一样。
当我终于让汽车在自动模式下工作时,它非常令人满意。但是也有点“怪异”。我实际上“教”了一个小大脑来跟随地板上的线。它几乎似乎模仿我糟糕的驾驶。它甚至学会了如何在直道上加速,并且在紧凑的曲线上减速。真的很酷!
虽然我在TensorFlow和Keras的工作中做过一些工作,但很多步骤都有点抽象。一旦我开始玩驴车,事情就更容易理解了。系统的优势及其弱点都变得清晰。我还意识到,在训练系统(我的MacBook)和推理系统(Pi)之间同步Python和TensorFlow库是一个关键步骤。
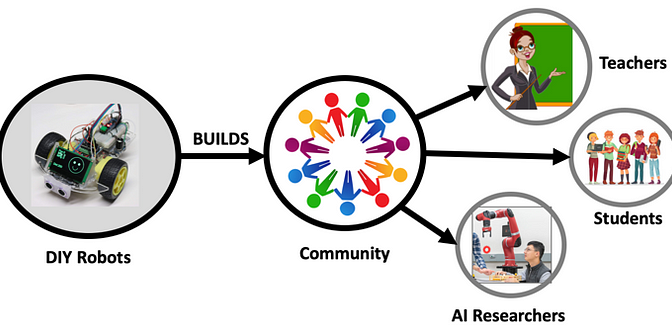
在完成所有步骤后,我现在了解了大部分组件,并且我正在构建一个“概念图”,其他人可以使用它来帮助理解他们需要知道什么概念才能让他们的Donkey Car运行。
我现在正在回顾我学到的所有步骤,并将这些步骤与我为当地CoderDojo俱乐部制作概念卡的先前工作相结合。这是博客文章顶部的数字。概念图中的每个方框最终将成为1/2张层压纸,正面有活动和问题,背面有答案。这些在CoderDojo中被称为“寿司卡”,因为它们是比特大小的学习点。以下是“电动机”概念卡的示例图像:

我的朋友Jon Herke也有兴趣使用Donkey Cars建立一个“AI赛车联盟”,旨在教孩子们关于人工智能和机器人技术。请继续关注我们是否可以为hackdays建立一个基础和一个为期10周,每周4小时的夏令营类型计划。我们希望让女孩和弱势青年参与这些计划。如果您有兴趣帮助我们入门,请告诉我们。